《帶傳動(dòng)的滑動(dòng)與效率實(shí)驗(yàn)yasuo--自改new》由會(huì)員分享,可在線閱讀����,更多相關(guān)《帶傳動(dòng)的滑動(dòng)與效率實(shí)驗(yàn)yasuo--自改new(4頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索。
1�、帶傳動(dòng)滑動(dòng)與效率實(shí)驗(yàn)指導(dǎo)書(shū)
、實(shí)驗(yàn)?zāi)康?
1. 了解帶傳動(dòng)中的彈性滑動(dòng)及打滑現(xiàn)象以及與帶傳動(dòng)承載能力的關(guān)系��;
2. 掌握帶傳動(dòng)的滑動(dòng)和效率的測(cè)試方法��,確定帶傳動(dòng)最合理的工作狀態(tài),探討改善
帶傳動(dòng)性能的措施���。
�、實(shí)驗(yàn)原理
帶傳動(dòng)的設(shè)計(jì)準(zhǔn)則是:保證傳動(dòng)帶在工作中不打滑�����,同時(shí)又有足夠的疲勞強(qiáng)度和壽命�����。 傳動(dòng)帶不出現(xiàn)打滑的臨界條件取決于帶傳動(dòng)的滑動(dòng)與承載能力 (有效拉力�����、扭矩或傳遞功率)
之間的關(guān)系��。在傳動(dòng)條件及初拉力一定的情況下帶傳動(dòng)的滑動(dòng)與有效拉力 F之間的關(guān)系曲
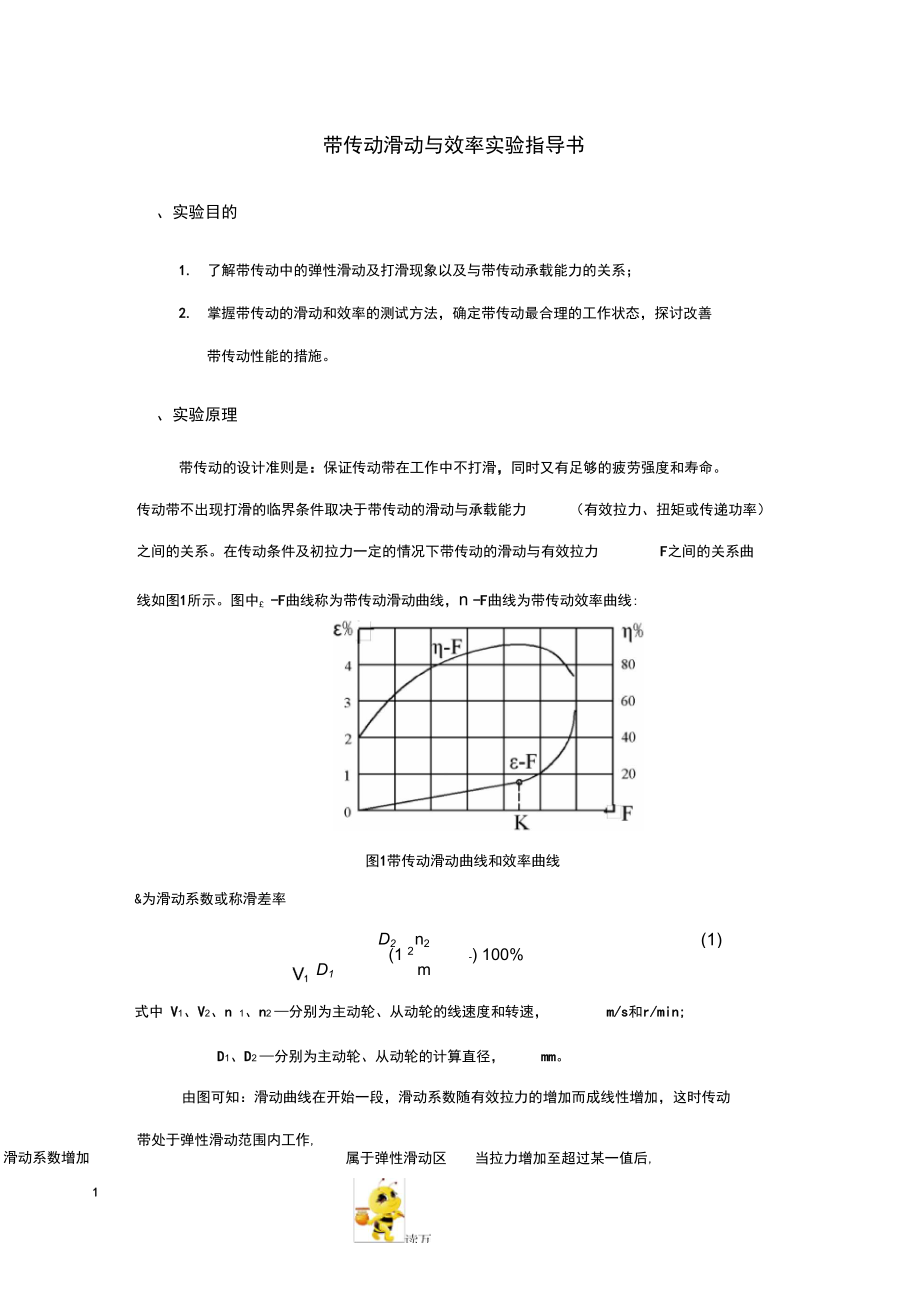
線如圖1所示�。圖中£ -F曲線稱(chēng)為帶傳動(dòng)滑動(dòng)曲線,n -F曲線為帶傳動(dòng)效率曲線:
圖1帶傳動(dòng)滑動(dòng)曲線和效率曲線
2����、
&為滑動(dòng)系數(shù)或稱(chēng)滑差率
(1)
D2 n2
(1 2 -) 100%
D1 m
式中 V1����、V2�、n 1�、n2 —分別為主動(dòng)輪、從動(dòng)輪的線速度和轉(zhuǎn)速����, m/s和r/min;
D1、D2 —分別為主動(dòng)輪�、從動(dòng)輪的計(jì)算直徑, mm��。
由圖可知:滑動(dòng)曲線在開(kāi)始一段�����,滑動(dòng)系數(shù)隨有效拉力的增加而成線性增加�,這時(shí)傳動(dòng)
帶處于彈性滑動(dòng)范圍內(nèi)工作,
屬于彈性滑動(dòng)區(qū)。
當(dāng)拉力增加至超過(guò)某一值后,
滑動(dòng)系數(shù)增加
1
很快�,帶處于彈性滑動(dòng)與打滑同時(shí)存在的范圍內(nèi)工作,屬于打滑區(qū)����。當(dāng)拉力繼續(xù)增加, 帶將
在帶輪上處于完全打滑工作狀態(tài),此時(shí)滑動(dòng)系數(shù)&近于直線上升�。為了保證傳動(dòng)帶在工
3、作中 不打滑���,又能發(fā)揮帶的最大工作能力���, 臨界條件應(yīng)取在k點(diǎn),在這一臨界條件下��,滑動(dòng)系數(shù)
e=1?2%����,且傳動(dòng)效率n處于較高值。
三����、實(shí)驗(yàn)裝置
1、主要結(jié)構(gòu)及工作原理
圖2為帶傳動(dòng)實(shí)驗(yàn)臺(tái)外觀結(jié)構(gòu)圖��。該實(shí)驗(yàn)臺(tái)主要由兩個(gè)直流電機(jī)組成或其中一個(gè)為主動(dòng)電
機(jī)5���,另一個(gè)為從動(dòng)電機(jī) 8�,作發(fā)電機(jī)使用�,其電樞繞組兩端接上燈泡負(fù)載 9�,主動(dòng)電機(jī)固
定在一個(gè)以水平方向移動(dòng)的底板 1上���,與發(fā)電機(jī)由一根平皮帶 6連接。在與滑動(dòng)底板相連
的法碼架上加上法碼����,即可拉緊皮帶 6。電機(jī)錠子未固定可轉(zhuǎn)動(dòng)�����,其外殼上裝有測(cè)力桿�,支
點(diǎn)壓在壓力傳感器上通過(guò)計(jì)算即可得到電動(dòng)機(jī)和發(fā)電機(jī)的轉(zhuǎn)矩。 兩電機(jī)后端裝有光電測(cè)速裝
4�����、
置和測(cè)速轉(zhuǎn)盤(pán)�����,所測(cè)轉(zhuǎn)速在面板上各自的數(shù)碼管上顯示�����。圖 3為實(shí)驗(yàn)設(shè)備邏輯框圖。
圖2 帶傳動(dòng)實(shí)驗(yàn)臺(tái)外觀結(jié)構(gòu)圖
1�、電機(jī)移動(dòng)底板 2、法碼 3�、壓力傳感器 4、彈性測(cè)力桿 5�、主動(dòng)電動(dòng)機(jī)
6、平皮帶 7���、光電測(cè)速裝置(圖中被遮住了) 8����、發(fā)電機(jī) 9�����、燈泡負(fù)載 10�����、機(jī)殼 11�����、控制
面板
D/A轉(zhuǎn)換
(WH
」實(shí)驗(yàn)臺(tái)控制及數(shù)據(jù)處理軟件
發(fā)電機(jī)
土傳感器T:n..)y
nr n����;
圖3 實(shí)驗(yàn)設(shè)備邏輯框圖
1)扭矩和效率的測(cè)定
電動(dòng)機(jī)輸出扭矩 T1 (即主動(dòng)輪扭矩)和發(fā)電機(jī)負(fù)載扭矩 T2 (即從動(dòng)輪扭矩)采用平衡
法來(lái)測(cè)定���。電動(dòng)機(jī)或發(fā)電機(jī)的定子外殼(即機(jī)殼)支承在支座的滾動(dòng)軸承中,并可繞與轉(zhuǎn)子 相重合的軸線任意擺動(dòng)�����。當(dāng)主動(dòng)電機(jī)啟動(dòng)和從動(dòng)電機(jī)帶負(fù)載后����, 由于定子磁場(chǎng)和電樞轉(zhuǎn)子間
的電磁力的相互作用��,主動(dòng)電動(dòng)機(jī)外殼將向與轉(zhuǎn)子旋轉(zhuǎn)的相反方向轉(zhuǎn)動(dòng)���, 從動(dòng)發(fā)電機(jī)外殼將
向與轉(zhuǎn)子旋轉(zhuǎn)的相同方向轉(zhuǎn)動(dòng)����, 為了阻止外殼轉(zhuǎn)動(dòng)�����,它們的轉(zhuǎn)動(dòng)力矩分別通過(guò)固定在外殼上
的壓力傳感器所產(chǎn)生的力矩來(lái)平衡�。 由于作用于定子上的力矩與轉(zhuǎn)子上的力矩是大小相等方
向相反的�,因此
主動(dòng)輪轉(zhuǎn)矩Tl Fl Ll
從動(dòng)輪轉(zhuǎn)矩 J F2 L2
 帶傳動(dòng)的滑動(dòng)與效率實(shí)驗(yàn)yasuo--自改new
帶傳動(dòng)的滑動(dòng)與效率實(shí)驗(yàn)yasuo--自改new