《電大本科 機電控制工程基礎(chǔ)期未復(fù)習(xí)215電大146(陳伯榮) 電大期末考試必備小抄》由會員分享���,可在線閱讀�,更多相關(guān)《電大本科 機電控制工程基礎(chǔ)期未復(fù)習(xí)215電大146(陳伯榮) 電大期末考試必備小抄(6頁珍藏版)》請在裝配圖網(wǎng)上搜索��。
1�、機電控制工程基礎(chǔ)期未復(fù)習(xí)試題一、 選擇題1. PI校正為( A )校正A滯后 B. 超前 C滯后超前 D超前滯后2. 一階系統(tǒng)的傳遞函數(shù)為,則其時間常數(shù)為( D )A0.5 B. 4 C. 2 D . 13系統(tǒng)的根軌跡( A )A起始于開環(huán)極點����,終于開環(huán)零點 B 起始于閉環(huán)極點,終于閉環(huán)零點C起始于閉環(huán)零點���,終于開環(huán)極點 D起始于開環(huán)零點����,終于開環(huán)極點4.一階系統(tǒng)的傳遞函數(shù)為,則其時間常數(shù)為( C )A0.5 B. 4 C. 2 D . 15. 二階系統(tǒng)的超調(diào)量 ����。( A )A. 只與有關(guān) B.與無關(guān) C.與和無關(guān) C.與和都有關(guān) 6 勞斯穩(wěn)定判據(jù)能判斷( A )的穩(wěn)定性。A線性定常系統(tǒng) B.
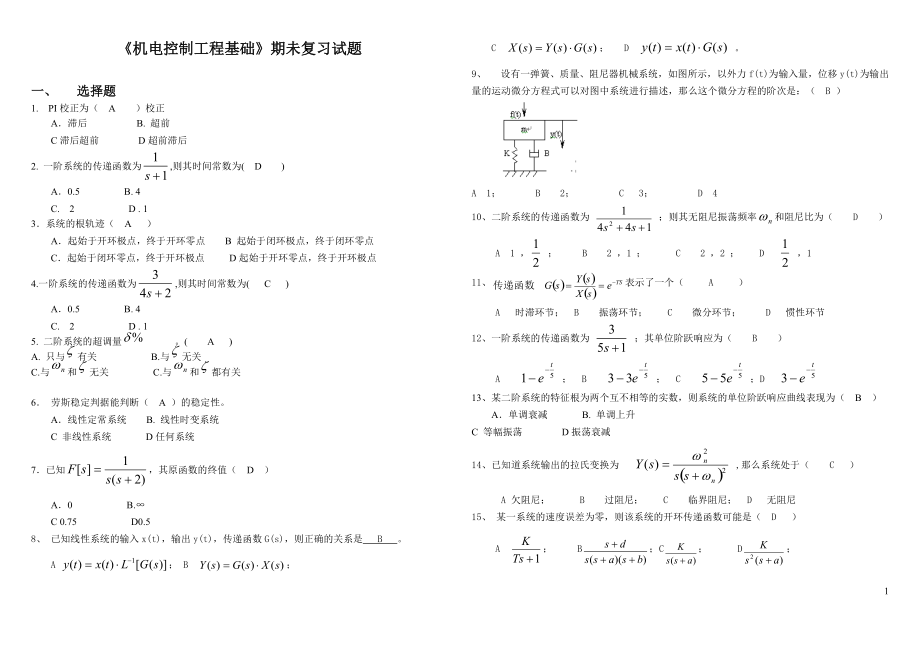
2����、 線性時變系統(tǒng) C 非線性系統(tǒng) D任何系統(tǒng)7已知���,其原函數(shù)的終值( D )A0 B. C 0.75 D0.58、 已知線性系統(tǒng)的輸入x(t)����,輸出y(t)�,傳遞函數(shù)G(s),則正確的關(guān)系是 B ���。A �����; B ����; C �����; D ��。9�、 設(shè)有一彈簧���、質(zhì)量、阻尼器機械系統(tǒng)�,如圖所示,以外力f(t)為輸入量���,位移y(t)為輸出量的運動微分方程式可以對圖中系統(tǒng)進行描述����,那么這個微分方程的階次是:( B )A 1����; B 2; C 3�; D 410、二階系統(tǒng)的傳遞函數(shù)為 �����;則其無阻尼振蕩頻率和阻尼比為( D )A 1 ���, ����; B 2 ,1 ��; C 2 ����,2 ; D �,111、表示了一個( A )A 時滯環(huán)節(jié)�����;
3�、 B 振蕩環(huán)節(jié)��; C 微分環(huán)節(jié)���; D 慣性環(huán)節(jié)12�、一階系統(tǒng)的傳遞函數(shù)為 �����;其單位階躍響應(yīng)為( B )A ��; B ; C ���;D 13����、某二階系統(tǒng)的特征根為兩個互不相等的實數(shù)�,則系統(tǒng)的單位階躍響應(yīng)曲線表現(xiàn)為( B )A單調(diào)衰減 B. 單調(diào)上升 C 等幅振蕩 D振蕩衰減14、已知道系統(tǒng)輸出的拉氏變換為 ,那么系統(tǒng)處于( C )A 欠阻尼��; B 過阻尼��; C 臨界阻尼���; D 無阻尼15��、 某一系統(tǒng)的速度誤差為零��,則該系統(tǒng)的開環(huán)傳遞函數(shù)可能是( D )A ����; B����;C�; D�;16、根據(jù)下列幾個系統(tǒng)的特征方程�����,可以判斷肯定不穩(wěn)定的系統(tǒng)為( B )A ��; B ��;C �;其中均為不等于零的正數(shù)。17�����、下列開環(huán)傳
4����、遞函數(shù)所表示的系統(tǒng)���,屬于最小相位系統(tǒng)的是( C )�。A ����; B (T0)��; C ���; D 18、已知系統(tǒng)頻率特性為�����,則該系統(tǒng)可表示為( C )A ��; B �����;C ��; D 20����、題圖中RC電路的幅頻特性為( B )。A �; B ; C ; D ���。21�����、已知系統(tǒng)頻率特性為 ����,則該系統(tǒng)可表示為( B )A ���; B ����; C ��; D 22����、已知系統(tǒng)頻率特性為 �,當輸入為時,系統(tǒng)的穩(wěn)態(tài)輸出為( D )A �����; B ;C �; D 23、理想微分環(huán)節(jié)對數(shù)幅頻特性曲線是一條斜率為( A )A ����,通過=1點的直線; B -�����,通過=1點的直線����;C -,通過=0點的直線����; D ,通過=0點的直線24���、 系統(tǒng)如圖所示���,為一個
5����、( C )裝置��,實現(xiàn)起來比較簡單�����。A 串聯(lián)校正�����; B 并聯(lián)校正����;C 混合校正; D 正反饋校正���。25���、二階系統(tǒng)的傳遞函數(shù)為 ;則其無阻尼振蕩頻率和阻尼比為( C )A 1 ��, ����; B 2 ,1 �����; C 1 ��,0.25 �����; D ���,二���、判斷題1、一個線性定常系統(tǒng)是穩(wěn)定的�����,則其開環(huán)極點位于S平面左半邊�。 ( )2、勞氏穩(wěn)定判據(jù)能判斷線性定常系統(tǒng)的穩(wěn)定性��。 ( + )3、型系統(tǒng)和開環(huán)增益為10��,系統(tǒng)在單位斜輸入作用下的穩(wěn)態(tài)誤差為�。()4、一個動態(tài)環(huán)節(jié)的傳遞函數(shù)乘以5����、二階系統(tǒng)的超調(diào)量越大,則系統(tǒng)的穩(wěn)定性越差����。( - )6、系統(tǒng)的傳遞函數(shù)和系統(tǒng)結(jié)構(gòu)及外輸入有關(guān)�����。( - )7�����、系統(tǒng)的穩(wěn)態(tài)誤差不僅與系統(tǒng)的結(jié)
6����、構(gòu)參數(shù)有關(guān),與輸入無關(guān)�。( - )8�����、若二階系統(tǒng)的阻尼比為0.866則系統(tǒng)的階躍響應(yīng)上定不是等幅振蕩。( +)9���、反饋控制系統(tǒng)�����、是指正反饋�。( - )10�����、某環(huán)節(jié)的輸出量與輸入量的關(guān)系為y(t=Kx(t)�����,K 是一常數(shù)�,則稱其為比例環(huán)節(jié)。( +)11���、已知系統(tǒng)頻率特性為 �����,則該系統(tǒng)可表示為��。 ( - )12���、一階微分環(huán)節(jié)的傳遞函數(shù)為��,其頻率特性可表示為���。 ( + )13、 積分環(huán)節(jié)的對數(shù)幅頻特性是一條斜率為的直線����。 ( + )14、 系統(tǒng)的傳遞函數(shù)�,輸出與輸入的相位差是。( - ) 15�、系統(tǒng)的幅頻特性、相頻特性取決于系統(tǒng)的輸入以及初始條件��。 ( - ) 16��、圖中所示的頻率特性是一個積分環(huán)節(jié)
7、���。 ( - ).17����、積分環(huán)節(jié)的幅頻特性,其幅值與頻率成正比關(guān)系����。 ( )18����、適合于應(yīng)用傳遞函數(shù)描述的系統(tǒng)可以是線性系統(tǒng),也可以是非線性系統(tǒng)���。( )19.某二階系統(tǒng)的特征根為兩個共軛純虛根����,則該系統(tǒng)的單位階躍響應(yīng)曲線表現(xiàn)為衰減振蕩( )三��、填空題1�����、系統(tǒng)輸出全部或部分地返回到輸入端��,就叫做 反饋 。2���、有些系統(tǒng)中�����,將開環(huán)與閉環(huán)結(jié)合在一起��,這種系統(tǒng)稱為 復(fù)合控制系統(tǒng) .����。3����、我們把輸出量直接或間接地反饋到 輸入端 ,形成閉環(huán)參與控制的系統(tǒng)���,稱作 閉環(huán)控制系統(tǒng) ����。 4���、控制的任務(wù)實際上就是 形成控制作用的規(guī)律 ��,使不管是否存在擾動���,均能使 被控制對象 的輸出量滿足給定值的要求�。 5��、系統(tǒng)受擾動后
8��、偏離了原工作狀態(tài)����,擾動消失后�,系統(tǒng)能自動恢復(fù)到原來的工作狀態(tài)這樣的系統(tǒng)是 穩(wěn)定 系統(tǒng)。6��、自動控制系統(tǒng)主要元件的特性方程式的性質(zhì)�,可以分為 線性控制系統(tǒng) 和非線性控制系統(tǒng)。7��、為了實現(xiàn)閉環(huán)控制�����,必須對 反饋 量進行測量,并將測量的結(jié)果反饋到輸入端與輸入量相減得到偏差�,再由偏差產(chǎn)生直接控制作用去消除 偏差 。因此����,整個控制系統(tǒng)形成一個閉合回路。我們把輸出量直接或間接地反饋到 輸入 端�,形成閉環(huán),參與控制的系統(tǒng),稱作閉環(huán)控制系統(tǒng)�。8、題圖由圖中系統(tǒng)可知�,輸入量直接經(jīng)過控制器作用于被控制對象,當出現(xiàn)擾動時��,沒有人為干預(yù)�����,輸出量 不能 按照輸入量所期望的狀態(tài)去工作���,圖中系統(tǒng)是一個 開環(huán) 控制系統(tǒng)�。9��、
9����、如果系統(tǒng)受擾動后偏離了原工作狀態(tài)����,擾動消失后���,系統(tǒng)能自動恢復(fù)到原來的工作狀態(tài)�,這樣的系統(tǒng)稱為 穩(wěn)定 系統(tǒng)���,否則為 不穩(wěn)定 系統(tǒng)����。任何一個反饋控制系統(tǒng)能正常工作��,系統(tǒng)必須是 穩(wěn)定 的�����。10�����、對于函數(shù)��,它的拉氏變換的表達式為 �����。 11�、單位階躍信號對時間求導(dǎo)的結(jié)果是 單位脈沖函數(shù) 。 12�����、單位階躍函數(shù)的拉普拉斯變換結(jié)果是 �。 13、單位脈沖函數(shù)的拉普拉斯變換為 A ���。 14���、的拉氏變換為 。 15����、的原函數(shù)的初值= 0 ,終值= 1 ��。16���、已知的拉氏變換為�����,則初值= 1 ��。 17���、的拉氏變換為 ��。 18���、若,則 F(s+a) ����。 19、若Lf(t)= F(s)�����,則Lf (t-b)=��、 �����。 20
10���、�����、描述系統(tǒng)在運動過程中各變量之間相互關(guān)系的數(shù)學(xué)表達式�����, ���。21、在初條件為零時��, 輸出量的拉氏變換 ��,與 輸入量的拉氏變換 之比稱為線性系統(tǒng)(或元件)的傳遞函數(shù)�。 23、數(shù)學(xué)模型是描述系統(tǒng) 輸入變量���、輸出變量之間關(guān)系 的數(shù)學(xué)表達式���,或者說是描述系統(tǒng)內(nèi)部變量之間關(guān)系的數(shù)學(xué)表達式���。24、如果系統(tǒng)的數(shù)學(xué)模型,方程是 線性 的�����,這種系統(tǒng)叫線性系統(tǒng)����。25、傳遞函數(shù)反映系統(tǒng)本身的瞬態(tài)特性����,與本身參數(shù),結(jié)構(gòu) 有關(guān) �,與輸入 無關(guān) ;不同的物理系統(tǒng)�, 可以 有相同的傳遞函數(shù),傳遞函數(shù)與初始條件 有關(guān) �。26、 慣性 環(huán)節(jié)的傳遞函數(shù)是 �����。 27�、二階系統(tǒng)的標準型式為 。 28�����、I型系統(tǒng)開環(huán)增益為10����,系統(tǒng)在單位
11、斜坡輸入作用下的穩(wěn)態(tài)誤差e()為 �����。 29����、時間響應(yīng)由 瞬態(tài) 響應(yīng)和 穩(wěn)態(tài) 響應(yīng)兩部分組成。 30��、為系統(tǒng)的 幅頻特性 ���,它描述系統(tǒng)對不同頻率輸入信號的穩(wěn)態(tài)響應(yīng)幅值衰減(或放大)的特性�����。為系統(tǒng)的 相頻特性 �����,它描述系統(tǒng)對不同頻率輸入信號的穩(wěn)態(tài)響應(yīng)����,相位遲后或超前的特性。31�、頻率響應(yīng)是 系統(tǒng)在正弦輸入信號下的 響應(yīng)。 32����、慣性環(huán)節(jié)的傳遞函數(shù)為 。33��、當輸入信號的角頻率在某一范圍內(nèi)改變時所得到的一系列頻率的響應(yīng)稱為這個系統(tǒng)的 頻率響應(yīng) �����。34���、控制系統(tǒng)的時間響應(yīng)�,可以劃分為瞬態(tài)和穩(wěn)態(tài)兩個過程。瞬態(tài)過程是指系統(tǒng)從 初始狀態(tài) 到接近最終狀態(tài)的響應(yīng)過程�����;穩(wěn)態(tài)過程是指時間t趨于 無窮 時系統(tǒng)的輸出狀
12�����、態(tài)���。35、若系統(tǒng)輸入為���,其穩(wěn)態(tài)輸出相應(yīng)為���,則該系統(tǒng)的頻率特性可表示為 。 36����、2型系統(tǒng)的對數(shù)幅頻特性低頻漸近線斜率為 -40 dB/dec 。37��、對于一階系統(tǒng)���,當由0時����,矢量D(j) 順時針 方向旋轉(zhuǎn),則系統(tǒng)是穩(wěn)定的�。否則系統(tǒng)不穩(wěn)定。 四��、分析�、計算綜合類型題1 設(shè)單位反饋系統(tǒng)的開環(huán)傳遞函數(shù)為:G(S)=, 試求階躍響應(yīng)的性能指標%及答案:系統(tǒng)閉環(huán)傳遞函數(shù)為:與二階傳遞函數(shù)的標準形式相比較���,可知:=0.25�, =0.25����,所以,系統(tǒng)為欠阻尼狀態(tài)���,則: =0.484 所以����,單位階躍響應(yīng)的性能指標為: =44.5% =28s2 已知系統(tǒng)的開環(huán)傳遞函數(shù)為:試:1)繪出對數(shù)漸近幅頻特性曲線以及相頻
13��、特性曲線; 2)用對數(shù)頻率穩(wěn)定判據(jù)判別系統(tǒng)閉環(huán)穩(wěn)定性�。 答案:1)(1) 該系統(tǒng)是由積分、放大和兩個慣性環(huán)節(jié)串聯(lián)構(gòu)成的��;(2) K=20 20lgK=26分貝 (3) 低頻為積分放大環(huán)節(jié)����,在�����,K=26分貝處作 -20dB/10倍頻 線在處作 -40dB/10倍頻 線�����,在處作 60dB/10倍頻 線 2)判斷穩(wěn)定性 由圖上可知L()0的部分���,對無穿越��,所以系統(tǒng)閉環(huán)穩(wěn)定����。3.單位反饋系統(tǒng)的開環(huán)傳遞函數(shù)為:����,試求在輸入信號為作用下的穩(wěn)態(tài)誤差�。解:系統(tǒng)是型系統(tǒng)當x(t)=5 時���,位置誤差系數(shù) 當x(t)= t 時���,速度誤差系數(shù) 故系統(tǒng)的穩(wěn)態(tài)誤差:4.設(shè)系統(tǒng)的傳遞函數(shù),求輸入信號為正弦信號����,頻率為f1H
14、z�,振幅為Xo5,初相為0時����,系統(tǒng)的穩(wěn)態(tài)輸出。答案:由可以看出G(s)是由放大環(huán)節(jié)和慣性環(huán)節(jié)串聯(lián)組成���,放大環(huán)節(jié)只影響輸出量的幅值����,而慣性環(huán)節(jié)對輸出量的幅值和相位都有影響�����。1) 輸出量的頻率與輸入量的頻率相同f1Hz,所以(rad/s)2) 輸出量與輸入量的相位差慣性環(huán)節(jié)的相位(滯后) 3) 輸出量的幅值 4) 穩(wěn)態(tài)輸出 5.已知單位負反饋系統(tǒng)開環(huán)傳遞函數(shù)為�,計算系統(tǒng)的阻尼比,無阻尼振蕩角頻率d的及調(diào)節(jié)時間ts(5%)���。答;系統(tǒng)閉環(huán)傳遞函數(shù)數(shù)與標準傳遞函數(shù)相比較得出=0.25 d=2 ts(5%)=6(s)公式:1��、 Lf (t-a)= 2���、 F(t)的拉氏變換F(s)=3��、 放大環(huán)節(jié)傳遞函數(shù):G(s)=K 4���、 慣性環(huán)節(jié)傳遞函數(shù):G(s)=K/(Ts+1)4�����、 積分環(huán)節(jié)傳遞函數(shù):G(s)=K/s5�、 振蕩環(huán)節(jié)傳遞函數(shù):6
 電大本科 機電控制工程基礎(chǔ)期未復(fù)習(xí)215電大146(陳伯榮) 電大期末考試必備小抄
電大本科 機電控制工程基礎(chǔ)期未復(fù)習(xí)215電大146(陳伯榮) 電大期末考試必備小抄