《變速恒頻雙饋異步發(fā)電機(jī)運(yùn)行原理講義》由會(huì)員分享���,可在線閱讀��,更多相關(guān)《變速恒頻雙饋異步發(fā)電機(jī)運(yùn)行原理講義(11頁珍藏版)》請?jiān)谘b配圖網(wǎng)上搜索�。
1�����、內(nèi)蒙古華電輝騰錫勒風(fēng)力發(fā)電有限公司
變速恒頻雙饋風(fēng)力發(fā)電機(jī)運(yùn)行原理
張波
風(fēng)力發(fā)電以其無污染和可再生性��,日益受到世界各國的廣泛重視����,近年來得 到迅速發(fā)展。采用雙饋電機(jī)的變速恒頻風(fēng)力發(fā)電系統(tǒng)與傳統(tǒng)的恒速恒頻風(fēng)力發(fā)電 系統(tǒng)相比具有顯著的優(yōu)勢����,如風(fēng)能利用系數(shù)高,能吸收由風(fēng)速突變所產(chǎn)生的能量 波動(dòng)以避免主軸及傳動(dòng)機(jī)構(gòu)承受過大的扭矩和應(yīng)力�,以及可以改善系統(tǒng)的功率因 數(shù)等。
雙饋電機(jī)變速恒頻(VSCF風(fēng)力發(fā)電系統(tǒng)�����,是通過調(diào)節(jié)轉(zhuǎn)子繞組勵(lì)磁電流的 頻率�、幅值�、相位和相序來實(shí)現(xiàn)變速恒頻控制����。 它的核心技術(shù)是基于電力電子和 計(jì)算機(jī)控制的交流勵(lì)磁控制技術(shù)。
1工作原理
1.1 雙饋電機(jī)的vscF空制
2�、原理
VSCFM力發(fā)電系統(tǒng)主要由風(fēng)力機(jī)、增速箱�、雙饋發(fā)電機(jī)、雙向變頻器和控 制器組成��。雙饋發(fā)電機(jī)可在不同的轉(zhuǎn)速下運(yùn)行����, 其轉(zhuǎn)速隨風(fēng)速的變化可作適當(dāng)?shù)?調(diào)整,使風(fēng)力機(jī)的運(yùn)行始終處于最佳狀態(tài)�����,以提高風(fēng)能的利用率�。當(dāng)電機(jī)的負(fù)載和 轉(zhuǎn)速變化時(shí),通過調(diào)節(jié)饋入轉(zhuǎn)子繞組的電流���,不僅能保持定子輸出的電壓和頻率不 變���,而且還能調(diào)節(jié)發(fā)電機(jī)的功率因數(shù)���。
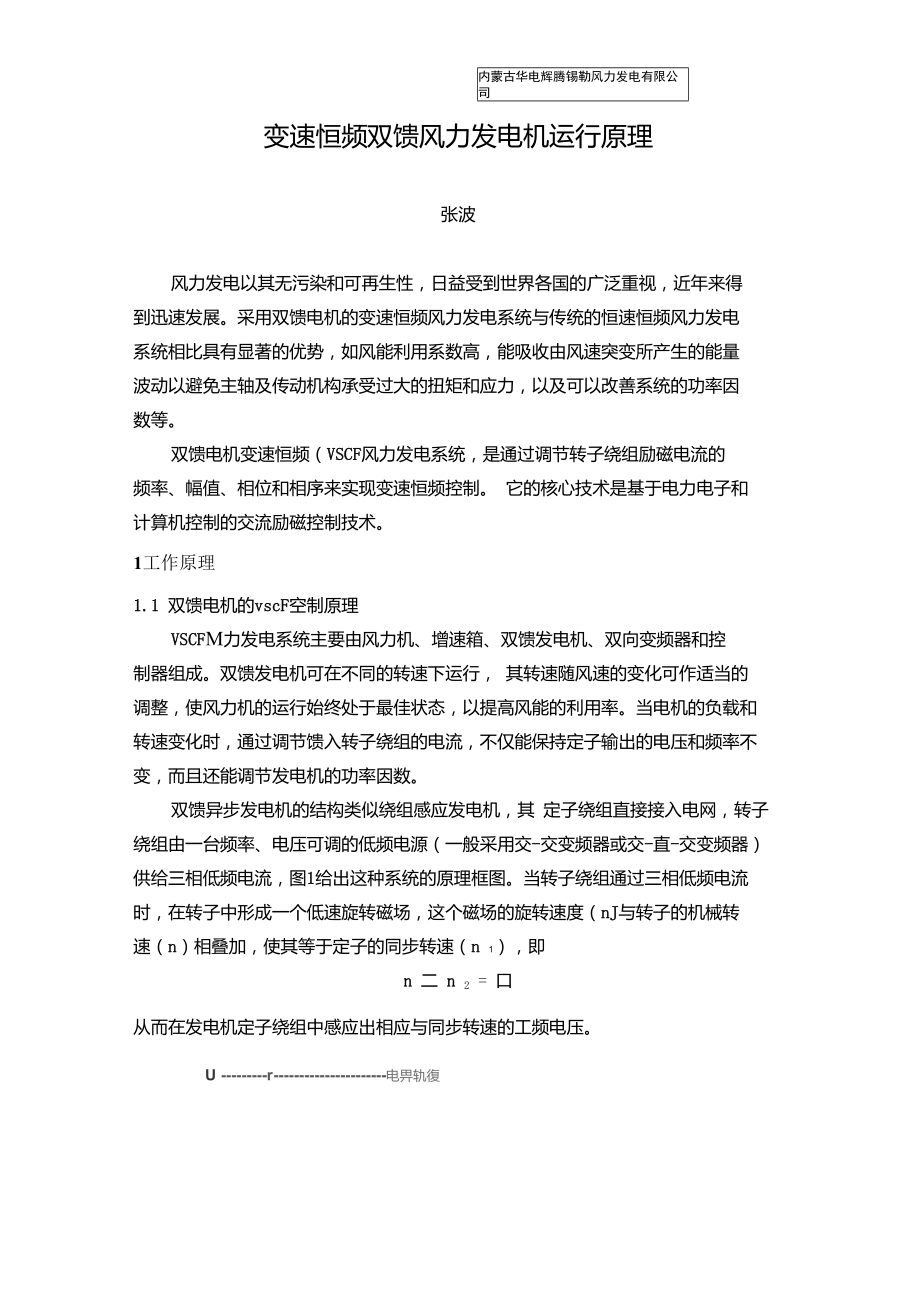
雙饋異步發(fā)電機(jī)的結(jié)構(gòu)類似繞組感應(yīng)發(fā)電機(jī)�����,其 定子繞組直接接入電網(wǎng)����,轉(zhuǎn)子 繞組由一臺(tái)頻率、電壓可調(diào)的低頻電源(一般采用交-交變頻器或交-直-交變頻器) 供給三相低頻電流���,圖1給出這種系統(tǒng)的原理框圖����。當(dāng)轉(zhuǎn)子繞組通過三相低頻電流 時(shí)����,在轉(zhuǎn)子中形成一個(gè)低速旋轉(zhuǎn)磁場,這個(gè)
3��、磁場的旋轉(zhuǎn)速度(nJ與轉(zhuǎn)子的機(jī)械轉(zhuǎn) 速(n)相疊加��,使其等于定子的同步轉(zhuǎn)速(n 1)���,即
n 二 n 2 = 口
從而在發(fā)電機(jī)定子繞組中感應(yīng)出相應(yīng)與同步轉(zhuǎn)速的工頻電壓����。
U r 電畀軌復(fù)
S1變速力發(fā)電系鎖原理格俚
Block diagnun of VSCF wind power gmemtiem M\trm
由上面轉(zhuǎn)速關(guān)系可以推出風(fēng)力發(fā)電機(jī)轉(zhuǎn)速與定、轉(zhuǎn)子繞組電流頻率的關(guān)系����,
即
Z^p/i/60 土 f2 (1)
式中fi、f2����、n和p分別為定子電流頻率、轉(zhuǎn)子電流頻率�、發(fā)電機(jī)的轉(zhuǎn)速和極 對數(shù)。
當(dāng)風(fēng)速變化時(shí)����,轉(zhuǎn)速隨之而變化。由式(1)可知��,當(dāng)轉(zhuǎn)速n發(fā)生變化時(shí)�����,若調(diào)
4、 節(jié)fzUzhsfJ相應(yīng)變化�����,可使fi保持恒定不變�����,即與電網(wǎng)頻率保持一致�����, 實(shí)現(xiàn) 風(fēng)力發(fā)電機(jī)的VSCF控制��。當(dāng)風(fēng)力發(fā)電機(jī)處于亞同步速運(yùn)行時(shí)���, 式(1)取正號;當(dāng) 風(fēng)力發(fā)電機(jī)處于超同步速運(yùn)行時(shí)���,式(1)取負(fù)號����;同步速運(yùn)行時(shí)�,f2=0,變流器向轉(zhuǎn) 子提供直流勵(lì)磁電流。
1.2 不同運(yùn)行方式下的轉(zhuǎn)子繞組功率流向
當(dāng)忽略電機(jī)損耗并取定子為發(fā)電機(jī)慣例而轉(zhuǎn)子為電動(dòng)機(jī)慣例時(shí), 發(fā)電機(jī)的定 子輸出電功率R等于轉(zhuǎn)子輸入電功率(轉(zhuǎn)差功率)與電機(jī)軸上輸入機(jī)械功率 Pmech 之和���,即
te據(jù)感應(yīng)電機(jī)的運(yùn)行原理?找『繞細(xì)的電功申和電
機(jī)軸I.的機(jī)械功率町分別表示為
耳n片 (3)
P*冃 lg (4)
5��、式中s為轉(zhuǎn)差率s = ^n^n �����。
< n1丿
由式⑵�、⑷ 可知���,當(dāng)發(fā)電機(jī)在亞同步速運(yùn)行時(shí)���,s>0,需要向轉(zhuǎn)子繞組饋 入電功率,由轉(zhuǎn)子傳遞給定子的電磁功率為 sPi,風(fēng)力機(jī)傳遞給定子的電功率只 有(1-s)Pi�����。當(dāng)發(fā)電機(jī)在超同步速運(yùn)行時(shí)�����,s<0,此時(shí)轉(zhuǎn)子繞組向外供電��,即定轉(zhuǎn) 子同時(shí)發(fā)電,此時(shí)風(fēng)力機(jī)供給發(fā)電機(jī)的功率增至 (1+| s|) Pi����。
雙饋發(fā)電機(jī)在低于和高于同步速不同運(yùn)行方式下的輸入輸出功率關(guān)系,可用 圖2功率流向示意圖表示����。由于在低于和高于同步速不同運(yùn)行方式下轉(zhuǎn)子繞組的 功率流向不同,因此需要采用雙向變頻器�。
V ⑹% fHrt速運(yùn)行
圖2雙諂鳳力發(fā)電機(jī)的功
6、率減向
Fi**2 Power fio* of doubly fed wind generator�
2勵(lì)磁控制系統(tǒng)結(jié)構(gòu)
2.1 勵(lì)磁控制系統(tǒng)的基本功能
為滿足雙饋發(fā)電機(jī)低于同步速����、等于同步速和高于同步速運(yùn)行的各種工況要 求�,向轉(zhuǎn)子繞組饋電的雙向變頻器應(yīng)滿足輸出電壓(或電流)幅值、頻率�、相位 和相序可調(diào)。通過控制勵(lì)磁電流的幅值和相位可以調(diào)節(jié)發(fā)電機(jī)的無功功率��; 通過
控制勵(lì)磁電流的頻率可調(diào)節(jié)發(fā)電機(jī)的有功功率�����; 通過風(fēng)力機(jī)變槳距控制與發(fā)電機(jī) 勵(lì)磁控制相結(jié)合���,可按最佳運(yùn)行方式調(diào)節(jié)發(fā)電機(jī)的轉(zhuǎn)速����。
2.2 勵(lì)磁控制系統(tǒng)基本組成
VSCF雙饋風(fēng)力發(fā)電機(jī)模擬試驗(yàn)系統(tǒng)框圖如圖 3所示。該系統(tǒng)由額
7�����、定功率為 2.8kW的繞線轉(zhuǎn)子感應(yīng)電機(jī)�、直流拖動(dòng)電動(dòng)機(jī)、調(diào)壓器����、IGBT交直交雙向變頻 器、光電編碼器��、電流及電壓傳感器���、 80C196M單片機(jī)�����、PC機(jī)及參數(shù)顯示器等
組成
?2
畋】
變連力崔唱樓XI試驗(yàn)系統(tǒng)祗朋
叭齊3 Block diagram of an experimentat for
VS(T wind pow^r genemtion
3勵(lì)磁系統(tǒng)控制原理
3.1 變速恒頻控制
雙饋風(fēng)力發(fā)電機(jī)的變速恒頻控制���,就是根據(jù)風(fēng)力機(jī)轉(zhuǎn)速的變化相應(yīng)地控制轉(zhuǎn)子 勵(lì)磁電流的頻率����,使雙饋發(fā)電機(jī)輸出的電壓頻率與電網(wǎng)保持一致��。實(shí)現(xiàn)變速恒頻控 制可以采用兩種方法���,即有轉(zhuǎn)速傳感器和無轉(zhuǎn)速
8���、傳感器的變速恒頻控制。前者控制 相對容易���,但需要光電編碼器��;后者控制技術(shù)稍復(fù)雜一些���。
圖3所示勵(lì)磁控制系統(tǒng)采用有速度傳感器的變速恒頻控制��。電機(jī)的極對數(shù)
p=2�,定子電流頻率fi=50Hz)將p和f i值代入式(1),可得勵(lì)磁電流頻率f 2的與 電機(jī)轉(zhuǎn)速檢測信號的關(guān)系式�����。
亞同步速時(shí)饋入轉(zhuǎn)子的電流頻率為
/;=50 Ap/IO 卓 (5)
超同步連時(shí)饋入轉(zhuǎn)子的電逆頻軍為
jtp/10 50 ⑹
式中kp是計(jì)數(shù)器在每10ms所記錄的光電編碼器的輸出脈沖數(shù)����。可根據(jù)光電編碼 器每轉(zhuǎn)輸出2000個(gè)脈沖計(jì)算出電機(jī)轉(zhuǎn)速與kp的關(guān)系���,具體推導(dǎo)公式詳見附錄�����。
圖4是雙饋發(fā)電機(jī)低于同步速運(yùn)行時(shí)轉(zhuǎn)
9����、子繞組電流隨轉(zhuǎn)速調(diào)節(jié)頻率的波形���。 由圖可以看出�,轉(zhuǎn)子電流的頻率根據(jù)轉(zhuǎn)速按式 (1)的規(guī)律變化�,實(shí)現(xiàn)了雙饋發(fā)電 機(jī)的變速恒頻控制。
圖4 電機(jī)轉(zhuǎn)速變(t(1200-1300r/min)&t的
■子耀姐電淹頻率変化液謬
Hg.4 Rotor current Maveform durinx 萍peed
variation from 1200 to 1300 r/niin
3.2 恒定電壓控制
當(dāng)定子繞組開路���,雙饋發(fā)電機(jī)作空載運(yùn)行時(shí)�,定子繞組開路相電壓的有效值 為
% = 4,44/�����;閑上.4 ⑺
式中fi為定子繞組的電壓頻率;N和kwi分別為定子繞組每相串聯(lián)匝數(shù)和
10����、繞組 系數(shù),公式推導(dǎo)詳見附錄�。每極磁通 0 = - I2由轉(zhuǎn)子繞組勵(lì)磁電流決定。
由式(7)可知����,當(dāng)定子繞組電壓頻率fi為恒定值時(shí),在不同轉(zhuǎn)速下只要保持
轉(zhuǎn)子繞組勵(lì)磁電流值不變便可使定子繞組端電壓保持不變�。 然而當(dāng)發(fā)電機(jī)負(fù)載運(yùn)
行時(shí),由于定子繞組電阻和漏電抗壓降���,以及由于定子電流電樞反應(yīng)磁場的影響�, 即使轉(zhuǎn)子勵(lì)磁電流不變����,每極磁通和定子繞組端電壓也不再是常數(shù)�。 為了保持在 不同運(yùn)行狀況下發(fā)電機(jī)端電壓恒定,需要通過電壓反饋調(diào)節(jié)轉(zhuǎn)子勵(lì)磁電流實(shí)現(xiàn)閉 環(huán)恒壓控制��。試驗(yàn)表明,雙饋發(fā)電機(jī)輸出電壓采用閉環(huán)控制后��,轉(zhuǎn)速由1300r/min 增加到1480r/min��,定子繞組輸出電壓僅變化了 0.2V�����。
11�����、
3.3 雙饋發(fā)電機(jī)的并網(wǎng)控制
傳統(tǒng)的風(fēng)力發(fā)電機(jī)組多采用異步發(fā)電機(jī)�, 并網(wǎng)時(shí)對電網(wǎng)的沖擊較大。雙饋發(fā) 電機(jī)可通過調(diào)節(jié)轉(zhuǎn)子勵(lì)磁電流實(shí)現(xiàn)軟并網(wǎng)�����,避免并網(wǎng)時(shí)發(fā)生的電流沖擊和過大的 電壓波動(dòng)���。
在圖3的勵(lì)磁控制系統(tǒng)中���,并網(wǎng)前用電壓傳感器分別檢測出電網(wǎng)和發(fā)電機(jī)電壓 的頻率、幅值����、相位和相序�����,通過雙向變流器調(diào)節(jié)轉(zhuǎn)子勵(lì)磁電流���,使發(fā)電機(jī)輸出電 壓與電網(wǎng)相應(yīng)電壓頻率、幅值及相位一致�,滿足并網(wǎng)條件時(shí)自動(dòng)并網(wǎng)運(yùn)行。由圖 5 看出�,并網(wǎng)后定子電流有振蕩現(xiàn)象,這是由于在并網(wǎng)試驗(yàn)中沒有采用有功和無功功 率閉環(huán)控制造成的���,采用閉環(huán)控制后����,發(fā)電機(jī)的功角保持不變可解決電流震蕩問題��。
發(fā)電機(jī)并網(wǎng)過程定子電圧和電流波
12����、彬
F Wcfon? of stator and cunrnt during
connecting generator lo wpply nuiin>
如圖5所示,并網(wǎng)前發(fā)電機(jī)電壓略高于電網(wǎng)電壓,并網(wǎng)后發(fā)電機(jī)電壓即為電 網(wǎng)電壓���。并網(wǎng)前發(fā)電機(jī)電流為輔助負(fù)載的電流,并網(wǎng)后的電流為饋入電網(wǎng)的電流�。 輔助負(fù)載用于并網(wǎng)前的發(fā)電機(jī)電壓和電流監(jiān)測, 并網(wǎng)后將輔助負(fù)載切除���。為了便
于并網(wǎng)前后發(fā)電機(jī)定子繞組電壓電流的比較����, 并網(wǎng)試驗(yàn)中采用了輔助負(fù)載檢測并 網(wǎng)前定子繞組的電壓和電流��,在實(shí)際 VSCF系統(tǒng)中��,不一定需要輔助負(fù)載���,可檢�測與比較電網(wǎng)和發(fā)電機(jī)的端電壓以確定是否滿足并網(wǎng)條件���。
3.4 三態(tài)轉(zhuǎn)換控
13、制
在亞同步速運(yùn)行時(shí)��,變頻器向轉(zhuǎn)子繞組饋入交流勵(lì)磁電流��,同步速運(yùn)行時(shí) 變流器向轉(zhuǎn)子繞組饋入直流電,而超同步速運(yùn)行時(shí)轉(zhuǎn)子繞組輸出交流電通過變流 器饋入電網(wǎng)����。亞同步、同步和超同步三種不同運(yùn)行狀態(tài)的動(dòng)態(tài)轉(zhuǎn)換是變速恒頻雙 饋風(fēng)力發(fā)電機(jī)勵(lì)磁控制的一項(xiàng)關(guān)鍵技術(shù)���。
由于風(fēng)速變化的不穩(wěn)定性��,風(fēng)力發(fā)電機(jī)難以長時(shí)間穩(wěn)定運(yùn)行在同步速��。 為了
避免反復(fù)跨越同步點(diǎn)和在同步速附近小轉(zhuǎn)差區(qū)的控制難度�,在實(shí)際變速恒頻風(fēng)力 發(fā)電系統(tǒng)中���,總是把穩(wěn)定運(yùn)行工作點(diǎn)選在避開同步速附近小轉(zhuǎn)差區(qū) (| s|<0.05)
以外的區(qū)間�。自然���,跨越同步點(diǎn)是難免的�。
跨越同步點(diǎn)的三種運(yùn)行狀態(tài)的轉(zhuǎn)換可采用兩種不同的方法��,一是采用“交 -
14�、直-交”控制模式,二是采用“交-交”控制模式���?��!敖?直-交”控制模式是隨著 發(fā)電機(jī)轉(zhuǎn)速的增高逐漸降低轉(zhuǎn)子繞組電流的頻率����, 當(dāng)轉(zhuǎn)速接近同步速時(shí)供給轉(zhuǎn)子
繞組直流(此時(shí)轉(zhuǎn)子三相繞組為“兩并一串”的聯(lián)接方式而變頻器控制不同橋臂 的三個(gè)功率開關(guān)器件同時(shí)導(dǎo)通或關(guān)閉�, 輸出可控的直流勵(lì)磁電流)����。當(dāng)轉(zhuǎn)速超過 同步速后,變流器停止直流供電���,此時(shí)轉(zhuǎn)子繞組向變流器輸出轉(zhuǎn)差頻率的交流電����。 采用“交-直-交”控制模式的發(fā)電機(jī)跨越同步速時(shí)的轉(zhuǎn)子電流實(shí)測波形如圖 6
所示��?!敖?交”控制模式因省去了向轉(zhuǎn)子繞組供直流電的環(huán)節(jié),控制稍微容易 一些�����,但三種運(yùn)行狀態(tài)轉(zhuǎn)換的平滑性稍差一些,其轉(zhuǎn)子電流試驗(yàn)波形如圖7所示��。
15�����、-8 -
內(nèi)蒙古華電輝騰錫勒風(fēng)力發(fā)電有限公司
6扉交■直■交r專換模式的轉(zhuǎn)子電流波形
Tested rotor current for AGDC-AC ami ersion rmwlt�
S/V2
*
40Omg
“交-交”轉(zhuǎn)換樓式的轉(zhuǎn)子電流波形
F也7 Tested rotor current forAGAC conversion mode
參考文獻(xiàn):
⑴中國電機(jī)工程學(xué)報(bào) 第23卷 第11期2003年11月 林成武 王鳳翔 姚興 佳
⑵《風(fēng)力發(fā)電》講座 第三講 中國科學(xué)院電工研究所 倪受元
⑶《電機(jī)學(xué)》中國電力出版社 第三版 東南大學(xué) 周鶚
⑷《風(fēng)力發(fā)電
16�����、》中國電力出版社 王承熙 張?jiān)?
附錄:
1�、公式推導(dǎo):
(1) f2 = sf1 推導(dǎo):
由于 f-p02,且
znH�����,所以f2二晉-士亠
60
(2) f 二
推導(dǎo):
設(shè)發(fā)電機(jī)轉(zhuǎn)子轉(zhuǎn)速為
n r/min��,貝U 1ms電機(jī)轉(zhuǎn)速為
n
60 1000
r/ms�,所以10ms輸
kp
脈沖個(gè)數(shù)kp
10n
60 1000
60 f
n =
P
,代入上式得
60f
10f,故 f
3 3 2
10
-9 -
內(nèi)蒙古華電輝騰錫勒風(fēng)力發(fā)電有限公司
-# -
內(nèi)蒙古華電輝騰錫勒風(fēng)力發(fā)電有限公司
(3) U���。=4.44
17�、刖應(yīng)推導(dǎo):
-# -
內(nèi)蒙古華電輝騰錫勒風(fēng)力發(fā)電有限公司
設(shè).=msin t ,則空載電動(dòng)勢 q = 一弘 =…N「mcos? ‘t = ?����、, 2E0 sin 7-90:,
dt
Eo
2二 fiNi m
x2
= 4.44 右弘 m =4.44 fiNik〕o ,其中:::=2 ����,
-10 -
內(nèi)蒙古華電輝騰錫勒風(fēng)力發(fā)電有限公司
-# -
內(nèi)蒙古華電輝騰錫勒風(fēng)力發(fā)電有限公司
m = k 1 0
2�����、功角
將— 定義為功角�。它表示發(fā)電機(jī)的勵(lì)磁電勢(空載電勢)和端電壓之間 相角差�。功角對于研究電機(jī)的功率變化和運(yùn)行的穩(wěn)定性有重
18、要意義����。 ’■為內(nèi)功率
因數(shù)角,其定義為空載電勢與負(fù)載電流之間的夾角��。
如圖所示:
-# -
內(nèi)蒙古華電輝騰錫勒風(fēng)力發(fā)電有限公司
-# -
內(nèi)蒙古華電輝騰錫勒風(fēng)力發(fā)電有限公司
圖I直接測■功角原理
Pnruof J !msHiirrnvLnt mst*r 7訂訕鏟
根據(jù)電機(jī)學(xué)原理�����,在忽略電機(jī)電樞繞組電阻情況下��,隱極發(fā)電機(jī)的有功功率 和無功功率可分別表示為
其中��,U為發(fā)電機(jī)的端電壓,Eq為發(fā)電機(jī)的感應(yīng)電勢���,Xd為發(fā)電機(jī)的同步電抗����,
S為感應(yīng)電勢與端電壓間的相位夾角(稱為發(fā)電機(jī)的功率角或功角)��,p為有功功
率��,Q為無功功率�。當(dāng)感應(yīng)電勢和電壓恒定時(shí),傳輸?shù)挠泄β适枪?S的正
弦函數(shù)�����。
3�����、IGBT(絕緣柵雙極型晶體管)
IGBT是以GTR功率晶體管)為主導(dǎo)元件����,MOSFEE■電力場效應(yīng)晶體管)為驅(qū)動(dòng) 元件的復(fù)合管。
等效電路圖如下:
S
(源極)
-11 -
 變速恒頻雙饋異步發(fā)電機(jī)運(yùn)行原理講義
變速恒頻雙饋異步發(fā)電機(jī)運(yùn)行原理講義