《大型數(shù)字式六自由度運(yùn)動(dòng)平臺(tái)的開發(fā)》由會(huì)員分享�,可在線閱讀����,更多相關(guān)《大型數(shù)字式六自由度運(yùn)動(dòng)平臺(tái)的開發(fā)(3頁珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索���。
1、大型數(shù)字式六自由度運(yùn)動(dòng)平臺(tái)的開發(fā)
一�、概述
六自由度運(yùn)動(dòng)平臺(tái)(用于加工業(yè)被稱為“虛擬軸機(jī)床”),由于有極為廣闊的應(yīng)用前景�,近幾年,引起了國外科研��、院校廣泛的研究興趣��。六自由度運(yùn)動(dòng)平臺(tái)是由六支油缸���,上��、下各六只萬向鉸鏈和上���、下兩個(gè)平臺(tái)組成�,下平臺(tái)固定在基礎(chǔ)上,借助六只油缸的伸縮運(yùn)動(dòng)�����,完成上平臺(tái)在空間六個(gè)自由度(X,Y�����,Z���,α�����,β�,γ)的運(yùn)動(dòng)�,從而可以模擬出各種空間運(yùn)動(dòng)姿態(tài),可廣泛應(yīng)用到各種訓(xùn)練模擬器中����,如飛行模擬器、艦艇模擬器�、海軍直升機(jī)起降模擬平臺(tái)、坦克模擬器����、汽車駕駛員模擬器、火車駕駛模擬器�����、地震模擬器以及動(dòng)感電影、娛樂設(shè)備等領(lǐng)域中���。在加工業(yè)可制成六軸聯(lián)動(dòng)機(jī)床�、機(jī)器人等���。由于六自由度運(yùn)動(dòng)
2��、平臺(tái)的研制��,涉及機(jī)械�、液壓�、電器、控制����、計(jì)算機(jī)、傳感器���,空間運(yùn)動(dòng)數(shù)學(xué)模型���、實(shí)時(shí)信號(hào)傳輸處理、圖形顯示���、動(dòng)態(tài)仿真等等一系列高科技領(lǐng)域��,因而六自由度運(yùn)動(dòng)平臺(tái)的研制變成了高等院校���、研究院所在液壓和控制領(lǐng)域水平的標(biāo)志性象征。國外某大型液壓公司的總部大廳里��,向客人展示水平的第一個(gè)標(biāo)志就是六自由度運(yùn)動(dòng)平臺(tái)�,筆者認(rèn)為,六自由度運(yùn)動(dòng)平臺(tái)是液壓及控制技術(shù)領(lǐng)域的皇冠級(jí)產(chǎn)品�,掌握了它,在液壓和控制領(lǐng)域基本上就沒有了難題���。以下介紹它的開發(fā)過程�����。
二�����、傳統(tǒng)的伺服液壓控制六自由度運(yùn)動(dòng)平臺(tái)
到目前為止�����,世界上所有國家和研制單位���,大型平臺(tái)都無一例外的采用了液壓伺服控制系統(tǒng)����。國內(nèi)以幾所名牌大學(xué)的研究水平較高��,其控制原理
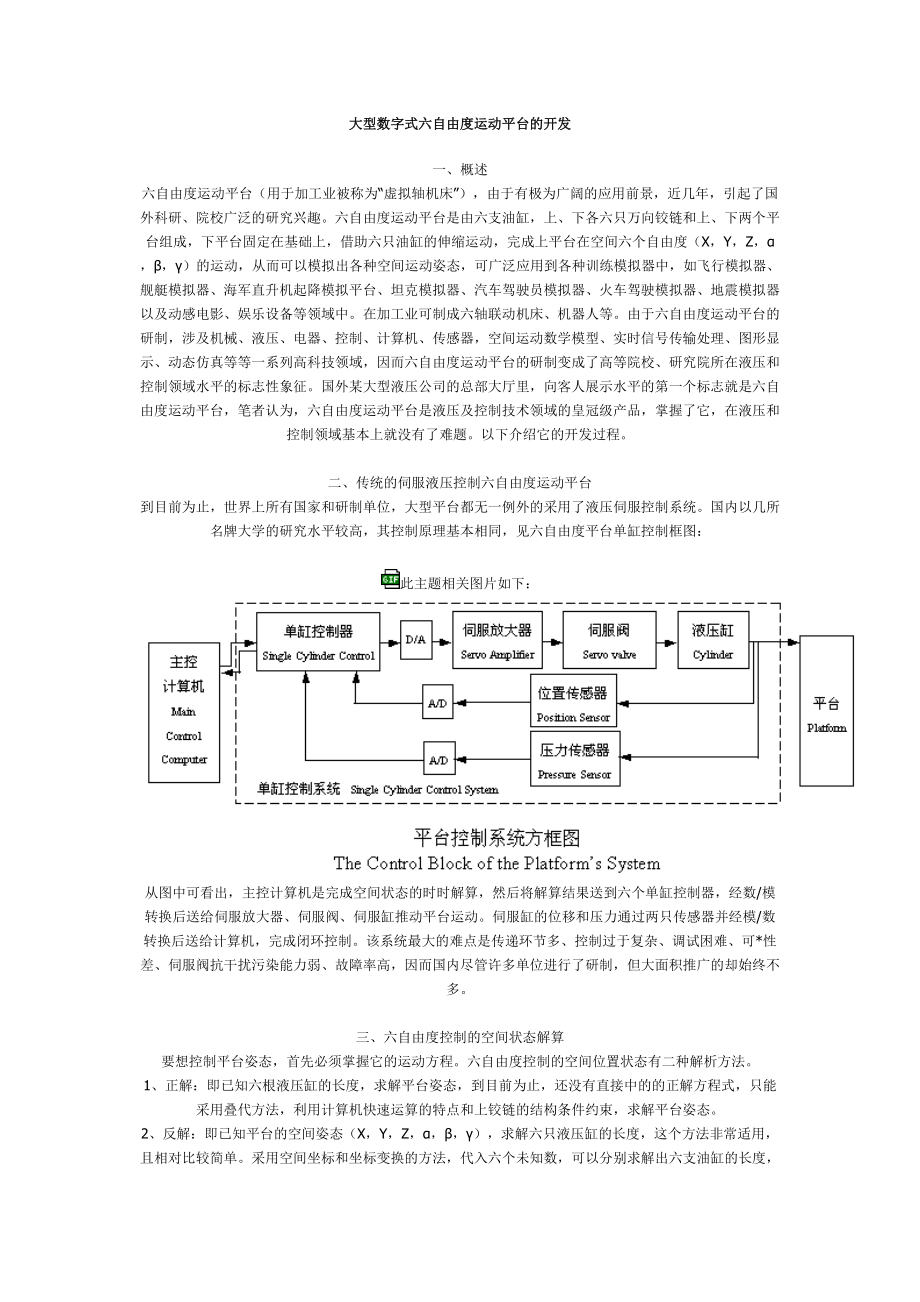
3�、基本相同,見六自由度平臺(tái)單缸控制框圖:
此主題相關(guān)圖片如下:
從圖中可看出����,主控計(jì)算機(jī)是完成空間狀態(tài)的時(shí)時(shí)解算,然后將解算結(jié)果送到六個(gè)單缸控制器���,經(jīng)數(shù)/模轉(zhuǎn)換后送給伺服放大器��、伺服閥���、伺服缸推動(dòng)平臺(tái)運(yùn)動(dòng)。伺服缸的位移和壓力通過兩只傳感器并經(jīng)模/數(shù)轉(zhuǎn)換后送給計(jì)算機(jī)��,完成閉環(huán)控制。該系統(tǒng)最大的難點(diǎn)是傳遞環(huán)節(jié)多�、控制過于復(fù)雜���、調(diào)試?yán)щy����、可*性差��、伺服閥抗干擾污染能力弱���、故障率高����,因而國內(nèi)盡管許多單位進(jìn)行了研制���,但大面積推廣的卻始終不多��。
三���、六自由度控制的空間狀態(tài)解算
要想控制平臺(tái)姿態(tài),首先必須掌握它的運(yùn)動(dòng)方程��。六自由度控制的空間位置狀態(tài)有二種解析方法。
1�����、正解:即已知六根液
4���、壓缸的長度��,求解平臺(tái)姿態(tài)�,到目前為止�,還沒有直接中的的正解方程式,只能采用疊代方法���,利用計(jì)算機(jī)快速運(yùn)算的特點(diǎn)和上鉸鏈的結(jié)構(gòu)條件約束��,求解平臺(tái)姿態(tài)�。
2����、反解:即已知平臺(tái)的空間姿態(tài)(X,Y�����,Z,α�����,β�,γ)��,求解六只液壓缸的長度���,這個(gè)方法非常適用����,且相對(duì)比較簡單�。采用空間坐標(biāo)和坐標(biāo)變換的方法,代入六個(gè)未知數(shù)��,可以分別求解出六支油缸的長度���,雖然計(jì)算繁雜�,但利用計(jì)算機(jī)的快速運(yùn)算特性�����,可以實(shí)時(shí)跟蹤姿態(tài)模擬操作器發(fā)出的姿態(tài)信號(hào),快速計(jì)算出每只油缸的長度��,從而實(shí)時(shí)跟蹤對(duì)平臺(tái)的操縱要求��,達(dá)到快速響應(yīng)的目的��。
四����、六自由度的速度協(xié)聯(lián)控制
由前面可知,當(dāng)給定空間狀后����,可以分別算出六只缸的不同長度,為了
5����、讓平臺(tái)上的油缸在同一時(shí)間運(yùn)動(dòng)到新的位置,六只缸的運(yùn)動(dòng)速度是不相同的����,這個(gè)問題的解決有兩種方法,一種是采購標(biāo)準(zhǔn)的協(xié)聯(lián)控制器�����,該控制器需將油缸的運(yùn)動(dòng)長度數(shù)值送入,控制器能按所要求的時(shí)間����,自動(dòng)分配六只缸的運(yùn)動(dòng)速度,同時(shí)到達(dá)終點(diǎn)���。第二種方法是自己編制運(yùn)動(dòng)速度方程����,采用長度的最小公倍數(shù)方法分配速度��,也可達(dá)到同樣目的����。
五�����、六自由度平臺(tái)的全數(shù)字控制
為了攻克六自由度運(yùn)動(dòng)平臺(tái)的應(yīng)用難關(guān)���,北京億美博科技有限公司采用了自己開發(fā)的性能先進(jìn)��、操作可*的新型數(shù)字(液壓)缸(已納入“十五”攻關(guān)和國家重點(diǎn)新產(chǎn)品項(xiàng)目)����,作為六只控制缸。該數(shù)字缸取消了傳統(tǒng)控制中的伺服閥�、傳感器、A/D轉(zhuǎn)換和D/A轉(zhuǎn)換等諸多環(huán)節(jié)�,它是
6、將傳感器�����、數(shù)字閥等全部做到油缸內(nèi)部����,形成自動(dòng)位置反饋和速度反饋。數(shù)字缸可以直接接受計(jì)算機(jī)發(fā)出的數(shù)字脈沖信號(hào)進(jìn)行可*的工作����。脈沖頻率代表數(shù)字缸運(yùn)動(dòng)速度,脈沖總數(shù)代表數(shù)字缸運(yùn)動(dòng)行程����。億美博公司與我國軍事院校合作,聯(lián)合開發(fā)了載重量3噸和8噸的數(shù)字式六自由度運(yùn)動(dòng)平臺(tái)����,它的控制框圖如下:
此主題相關(guān)圖片如下:
從上圖與伺服系統(tǒng)的框圖比較可知����,控制原理大大簡化����,不但系統(tǒng)響應(yīng)速度加快,而且故障率也大大降低���,可*性得以大為增加。整個(gè)六自由度運(yùn)動(dòng)平臺(tái)無任何液壓控制元件和傳感器���,系統(tǒng)構(gòu)成十分清爽��。實(shí)際情況如右側(cè)照片所示。平臺(tái)運(yùn)動(dòng)的錄像可在http://www.china-
運(yùn)動(dòng)技術(shù)指標(biāo):
自由度
7�����、 位移(聯(lián)合運(yùn)動(dòng)) 位移(單自由度) 速度 加速度
俯仰 30 deg 25deg 20 deg/s 350 deg/s2
滾轉(zhuǎn) 35 deg 30deg 24 deg/s 140 deg/s2
升降 0.60 m 0.60m 0.40 m/s + 1.0G
縱向擺動(dòng) 0.60 m 0.40m 0.36 m/s 0.6G
液壓系統(tǒng)指標(biāo):
系統(tǒng)壓力:14MPa
系統(tǒng)最大供油量:650L/分
數(shù)字缸:
直徑:110mm/75mm��;
行程:1200mm
液壓系統(tǒng)圖:
此主題相關(guān)圖片如下:
 大型數(shù)字式六自由度運(yùn)動(dòng)平臺(tái)的開發(fā)
大型數(shù)字式六自由度運(yùn)動(dòng)平臺(tái)的開發(fā)